- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Įvadas į baterijų matuoklius
Įvadas į baterijų matuoklius
1.1 Supažindinimas su elektros skaitiklio funkcijomis
Akumuliatoriaus valdymas gali būti laikomas energijos valdymo dalimi. Valdant akumuliatorių, elektros skaitiklis yra atsakingas už akumuliatoriaus talpos įvertinimą. Pagrindinė jo funkcija yra stebėti įtampą, įkrovimo / iškrovimo srovę ir akumuliatoriaus temperatūrą bei įvertinti akumuliatoriaus įkrovimo būseną (SOC) ir pilną įkrovimo talpą (FCC). Yra du tipiniai akumuliatoriaus įkrovos būsenos įvertinimo metodai: atviros grandinės įtampos metodas (OCV) ir kuloninis matavimo metodas. Kitas metodas yra RICHTEK sukurtas dinaminės įtampos algoritmas.
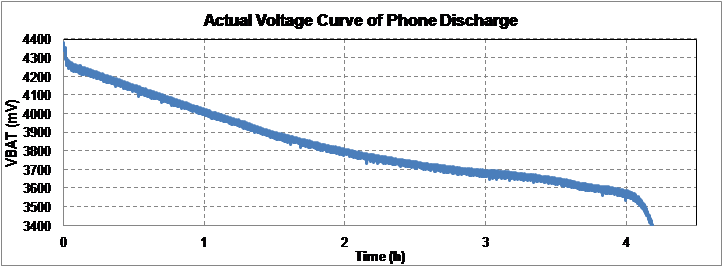
1.2 Atviros grandinės įtampos metodas
Elektros skaitiklio atvirosios grandinės įtampos metodo panaudojimo metodas yra gana paprastas, jį galima gauti patikrinus atitinkamą atviros grandinės įtampos įkrovimo būseną. Numatoma atviros grandinės įtampos sąlyga yra akumuliatoriaus gnybtų įtampa, kai akumuliatorius ilsisi maždaug 30 minučių.
Akumuliatoriaus įtampos kreivė skiriasi priklausomai nuo apkrovos, temperatūros ir akumuliatoriaus senėjimo. Todėl fiksuotas atviros grandinės voltmetras negali visiškai parodyti įkrovos būsenos; Neįmanoma įvertinti įkrovos būsenos vien ieškant lentelių. Kitaip tariant, jei įkrovos būsena apskaičiuojama tik pažvelgus į lentelę, klaida bus didelė.
Toliau pateiktame paveikslėlyje parodyta, kad esant tokiai pačiai akumuliatoriaus įtampai, labai skiriasi įkrovos būsena, gauta naudojant atviros grandinės įtampos metodą.
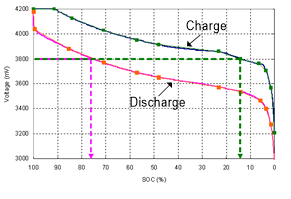
5 pav. Akumuliatoriaus įtampa įkrovimo ir iškrovimo sąlygomis
Kaip parodyta paveikslėlyje žemiau, taip pat labai skiriasi įkrovos būsena esant skirtingoms apkrovoms iškrovimo metu. Taigi iš esmės atvirosios grandinės įtampos metodas tinka tik sistemoms, kurioms keliami maži įkrovimo tikslumo reikalavimai, pavyzdžiui, automobiliams, kuriuose naudojami švino rūgšties akumuliatoriai arba nepertraukiamo maitinimo šaltiniai.
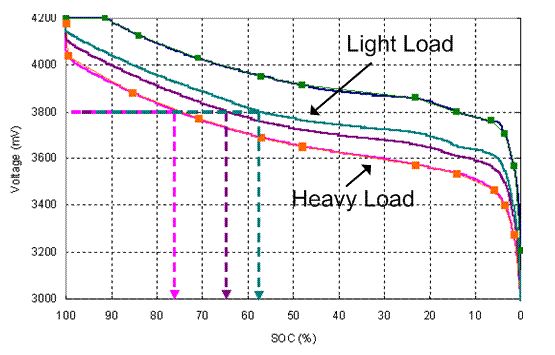
2 pav. Akumuliatoriaus įtampa esant skirtingoms apkrovoms išsikrovimo metu
1.3 Kuloninė metrologija
Kulono metrologijos veikimo principas yra prijungti aptikimo rezistorių akumuliatoriaus įkrovimo / iškrovimo kelyje. ADC matuoja aptikimo rezistoriaus įtampą ir konvertuoja ją į dabartinę įkraunamos arba išsikraunančios baterijos vertę. Realaus laiko skaitiklis (RTC) integruoja dabartinę vertę su laiku, kad nustatytų, kiek kulonų teka.

3 pav. Pagrindinis Kulono matavimo metodo darbo režimas
Kuloninė metrologija gali tiksliai apskaičiuoti įkrovimo būseną realiuoju laiku įkrovimo ar iškrovimo proceso metu. Naudodamas įkrovimo kulonų skaitiklį ir iškraunantį Kulono skaitiklį, jis gali apskaičiuoti likusią elektros galią (RM) ir visą įkrovimo pajėgumą (FCC). Tuo pačiu metu likusią įkrovimo talpą (RM) ir visiškai įkrautą talpą (FCC) taip pat galima naudoti apskaičiuojant įkrovos būseną, t. y. (SOC=RM/FCC). Be to, jis taip pat gali įvertinti likusį laiką, pvz., energijos išeikvojimą (TTE) ir galios įkrovimą (TTF).
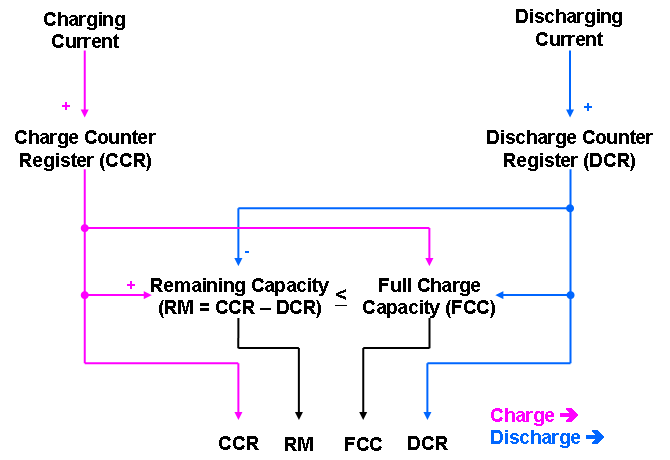
4 pav. Kulono metrologijos skaičiavimo formulė
Yra du pagrindiniai veiksniai, lemiantys Kulono metrologijos tikslumo nuokrypį. Pirmasis yra srovės jutimo ir ADC matavimo poslinkio klaidų kaupimasis. Nors naudojant dabartinę technologiją matavimo paklaida yra santykinai maža, be tinkamo metodo jai pašalinti, laikui bėgant ši paklaida didės. Toliau pateiktame paveikslėlyje parodyta, kad praktikoje, jei nėra laiko trukmės korekcijos, sukaupta klaida yra neribota.
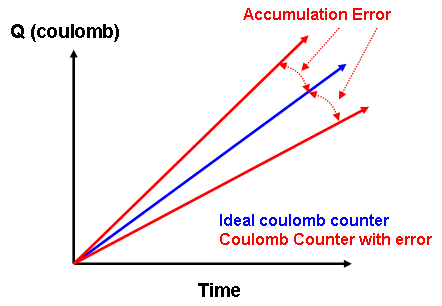
5 pav. Kulono matavimo metodo sukaupta paklaida
Norint pašalinti kaupiamas klaidas, yra trys galimi laiko momentai, kuriuos galima naudoti normaliai veikiant akumuliatoriui: įkrovimo pabaiga (EOC), iškrovimo pabaiga (EOD) ir ramybė (atsipalaidavimas). Kai įvykdoma įkrovimo pabaigos sąlyga, tai rodo, kad akumuliatorius yra visiškai įkrautas ir įkrovimo būsena (SOC) turi būti 100%. Iškrovimo pabaigos būsena rodo, kad baterija visiškai išsikrovė, o įkrovimo būsena (SOC) turi būti 0 %; Tai gali būti absoliuti įtampos vertė arba ji gali skirtis priklausomai nuo apkrovos. Pasiekus ramybės būseną, akumuliatorius nei kraunamas, nei išsikrauna, o tokioje būsenoje išlieka ilgą laiką. Jei vartotojas nori naudoti akumuliatoriaus poilsio būseną, kad ištaisytų kulometrinio metodo klaidą, šiuo metu turi būti naudojamas atviros grandinės voltmetras. Toliau pateiktame paveikslėlyje parodyta, kad įkrovimo būsenos klaida gali būti ištaisyta aukščiau nurodytose būsenose.
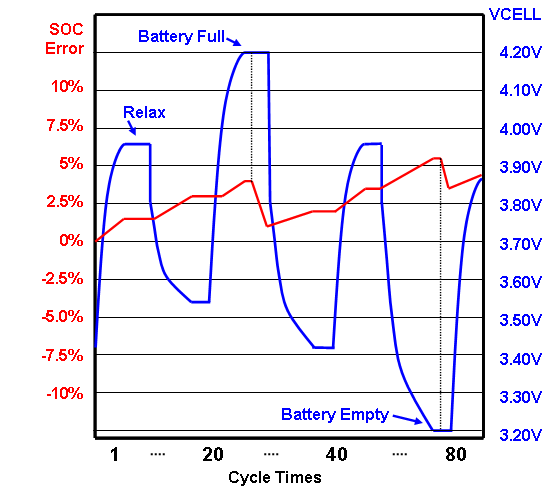
6 pav. Kuloninės metrologijos susikaupusių klaidų pašalinimo sąlygos
Antras pagrindinis veiksnys, lemiantis Kulono metrologijos tikslumo nuokrypį, yra Full Charge Capacity (FCC) klaida, kuri yra skirtumas tarp projektuojamos baterijos talpos ir tikrosios pilnos baterijos įkrovimo talpos. Visiškai įkrautą talpą (FCC) įtakoja tokie veiksniai kaip temperatūra, senėjimas ir apkrova. Todėl permokymas ir visiškai įkrautos talpos kompensavimo metodai yra labai svarbūs kulonų metrologijai. Toliau pateiktame paveikslėlyje parodytas įkrovimo būsenos paklaidos tendencijos reiškinys, kai visiškai įkrauta talpa yra pervertinta ir neįvertinta.
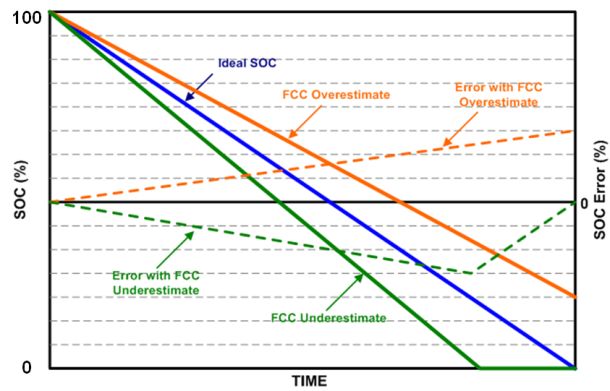
7 pav. Klaidų tendencija, kai visiškai įkrauta talpa yra pervertinta arba neįvertinta
1.4 Dinaminio įtampos algoritmo elektros skaitiklis
Dinaminės įtampos algoritmas gali apskaičiuoti ličio akumuliatoriaus įkrovos būseną, remdamasis tik akumuliatoriaus įtampa. Šis metodas įvertina įkrovos būsenos padidėjimą arba sumažėjimą pagal skirtumą tarp akumuliatoriaus įtampos ir akumuliatoriaus atviros grandinės įtampos. Dinaminės įtampos informacija gali efektyviai imituoti ličio baterijų elgesį ir nustatyti įkrovimo būseną (SOC) (%), tačiau šiuo metodu negalima įvertinti akumuliatoriaus talpos vertės (mAh).
Jo apskaičiavimo metodas pagrįstas dinaminiu skirtumu tarp akumuliatoriaus įtampos ir atviros grandinės įtampos ir įvertina įkrovos būseną, naudodamas iteracinius algoritmus, kad apskaičiuotų kiekvieną įkrovos būsenos padidėjimą arba sumažėjimą. Lyginant su Kulono metodo elektros skaitiklių sprendimu, dinaminės įtampos algoritmo elektros skaitikliai nekaupia paklaidų per laiką ir srovę. Kuloniniai matavimo skaitikliai dažnai netiksliai įvertina įkrovos būseną dėl srovės jutimo klaidų ir akumuliatoriaus savaiminio išsikrovimo. Net jei srovės jutimo klaida yra labai maža, Kulono skaitiklis ir toliau kaups klaidas, kurias galima pašalinti tik visiškai įkrovus arba iškrovus.
Dinaminis įtampos algoritmas naudojamas akumuliatoriaus įkrovos būsenai įvertinti, remiantis vien tik įtampos informacija; Kadangi jis nėra įvertintas pagal esamą akumuliatoriaus informaciją, klaidų nesikaupia. Siekiant pagerinti įkrovos būsenos tikslumą, dinaminės įtampos algoritmas turi naudoti faktinį įrenginį optimizuoto algoritmo parametrams reguliuoti pagal tikrąją akumuliatoriaus įtampos kreivę visiškai įkrauto ir visiškai išsikrovusio sąlygomis.

8 pav. Dinaminio įtampos algoritmo veikimas elektros skaitikliui ir stiprinimo optimizavimui
Toliau pateikiamas dinaminės įtampos algoritmo veikimas skirtingomis iškrovos sąlygomis, atsižvelgiant į įkrovos būseną. Kaip parodyta paveikslėlyje, jo įkrovimo būsenos tikslumas yra geras. Nepriklausomai nuo C/2, C/4, C/7 ir C/10 iškrovimo sąlygų, bendra šio metodo įkrovimo paklaida yra mažesnė nei 3%.

9 pav. Dinaminės įtampos algoritmo įkrovos būsenos veikimas skirtingomis iškrovos sąlygomis
Toliau pateiktame paveikslėlyje parodyta akumuliatoriaus įkrovimo būsena trumpo įkrovimo ir trumpo iškrovimo sąlygomis. Įkrovos būsenos paklaida vis dar yra labai maža, o didžiausia paklaida yra tik 3%.

10 pav. Dinaminės įtampos algoritmo įkrovimo būsenos veikimas trumpo baterijų įkrovimo ir trumpo iškrovimo atveju
Palyginti su Kulono matavimo metodu, dėl kurio dažniausiai būna netiksli įkrovimo būsena dėl srovės jutimo klaidų ir akumuliatoriaus savaiminio išsikrovimo, dinaminės įtampos algoritmas nekaupia klaidų per laiką ir srovę, o tai yra didelis privalumas. Kadangi trūksta informacijos apie įkrovimo/iškrovimo sroves, dinaminės įtampos algoritmas pasižymi prastu trumpalaikiu tikslumu ir lėtu atsako laiku. Be to, jis negali įvertinti visos įkrovimo galios. Tačiau jis gerai veikia ilgalaikio tikslumo požiūriu, nes akumuliatoriaus įtampa galiausiai tiesiogiai atspindi jo įkrovimo būseną.
Ankstesnis:Ličio baterijų įkrovimo ir iškrovimo teorija

